
ロボティクスニュース
MIT CSAIL「Neural Jacobian Fields」、センサー不要でロボットが自己学習する画期的技術
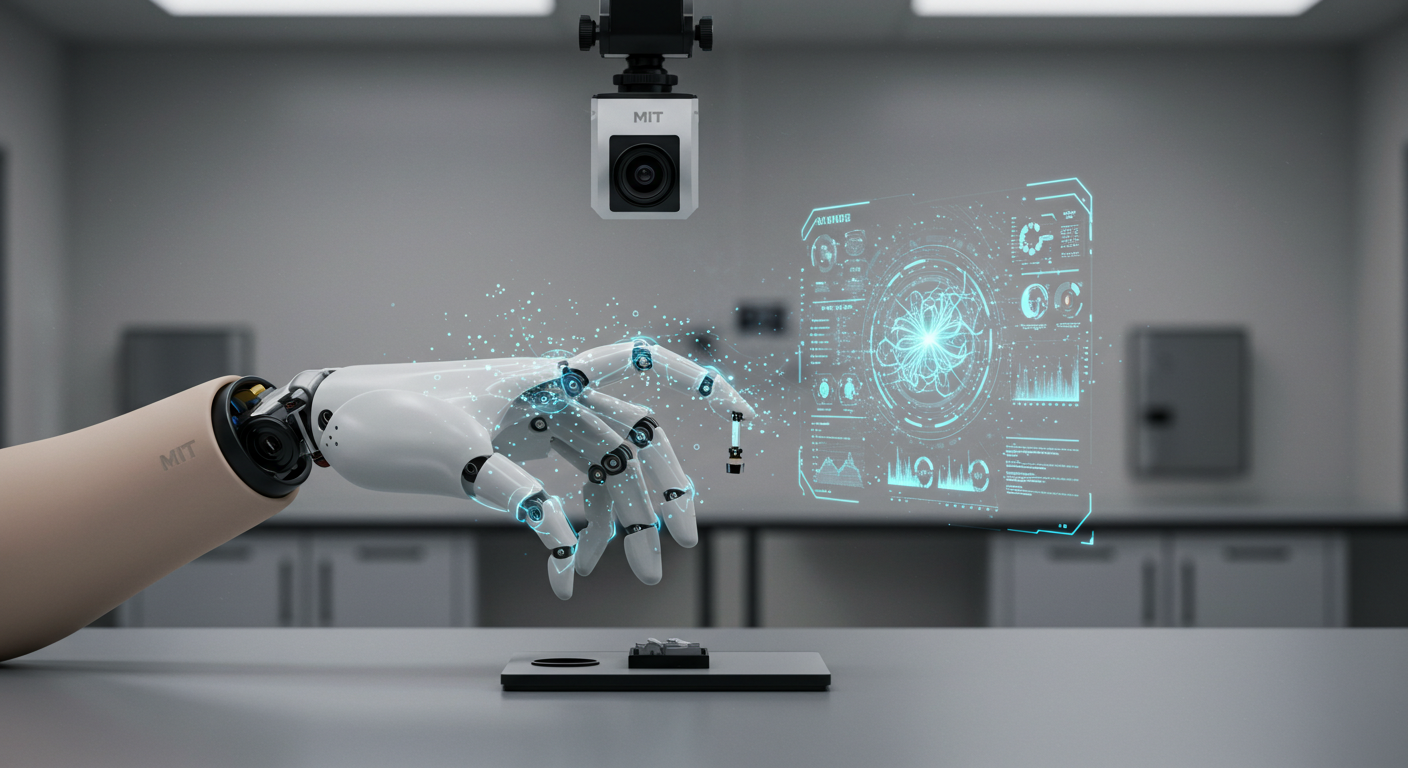
MIT コンピュータサイエンス・人工知能研究所(CSAIL)の研究者らが、ロボットが単一のカメラのみで自身の身体を理解し制御する新システム「Neural Jacobian Fields(NJF)」を開発した。
この研究成果は2025年6月25日に学術誌『Nature』に掲載された。主要研究者は MIT 電気工学・コンピュータサイエンス博士課程学生の Sizhe Lester Li 氏で、指導教授は Vincent Sitzmann 助教授と Daniela Rus 教授である。
NJF システムはロボットがランダムな動作を実行する際に12台のRGB-Dカメラで記録し、視覚データのみから制御信号と身体の反応関係を学習する。訓練完了後は単眼カメラ1台で約12ヘルツのリアルタイム制御が可能だ。
研究チームは空気圧ソフトロボットハンド、剛性 Allegro ハンド、3D プリンテッドロボットアーム、回転プラットフォームで検証を実施した。この技術により従来必要だった埋め込みセンサーや複雑なプログラミングが不要となり、農業や建設現場での応用が期待される。
From: ![]() Robot, know thyself: New vision-based system teaches machines to understand their bodies
Robot, know thyself: New vision-based system teaches machines to understand their bodies
【編集部解説】
この技術の革新性を理解するために、まず従来のロボット制御がいかに複雑だったかを振り返る必要があります。産業用ロボットアームのような従来型ロボットは、剛体リンクと関節で構成され、数学的にモデル化しやすい構造を持っていました。しかし、ソフトロボットや生物模倣型ロボットの場合、材料が変形し、予測困難な動きをするため、従来の制御手法では限界がありました。
Neural Jacobian Fields(NJF)が画期的なのは、この根本的な課題を視覚学習で解決した点にあります。システムの核心となる「Jacobian場」とは、ロボットの任意の点が制御入力に対してどのように動くかを予測する数学的関数のことです。これをNeural Radiance Fields(NeRF)技術と組み合わせることで、3D形状と動特性を同時に学習可能にしました。
技術的な詳細について説明すると、訓練段階では12台のRGB-Dカメラでロボットのランダムな動作を記録します。しかし実際の制御時には、単眼カメラ1台で12Hzのリアルタイム制御を実現している点が実用性を大きく高めています。これは多くの物理ベースシミュレーターよりも高速で、実世界での応用を現実的なものにしています。
この技術によって可能になることは多岐にわたります。農業分野では、センチメートル級の精度で作物の収穫や選別が可能になり、建設現場では複雑なセンサー配列なしに不整地での作業ができるようになります。特に注目すべきは、従来センサー埋め込みが困難だった柔軟な材料や不規則な形状のロボットでも精密制御が実現できる点です。
ポジティブな側面として、このシステムは設計の自由度を劇的に拡張します。従来は制御の都合上、ロボットの形状や材料に制約がありましたが、NJFによってその制約が取り除かれました。また、将来的にはスマートフォンでの撮影だけで制御モデルを作成できる可能性も示唆されており、ロボティクスのアクセシビリティが大幅に向上する見込みです。
一方で、潜在的なリスクや限界も存在します。現時点では異なるロボット間での汎化ができず、各ロボットごとに個別の訓練が必要です。また、力や触覚センシング機能がないため、接触を伴う作業では効果が限定される可能性があります。オクルージョン(遮蔽)への対応や長期的な空間・時間推論能力の向上も今後の課題として挙げられています。
規制面での影響を考えると、従来のセンサー依存型ロボットとは異なる安全基準や認証プロセスが必要になる可能性があります。視覚ベースの制御システムでは、照明条件やカメラの視野角制限といった環境要因が性能に影響するため、これらを考慮した新たな安全規格の策定が求められるでしょう。
長期的な視点では、この技術はロボティクスの民主化を促進する可能性を秘めています。高価なセンサーや複雑なプログラミングが不要になることで、中小企業や個人開発者でもロボット開発に参入しやすくなります。また、AGI(汎用人工知能)の発展において、身体認識は重要な要素であり、NJFのような技術がその基盤を提供する意義は計り知れません。
【用語解説】
Neural Jacobian Fields(NJF)
ロボットの3次元形状と制御入力への感度を同時に学習するニューラルネットワーク技術。視覚情報のみからロボットの身体モデルを構築し、制御を可能にする。
Jacobian場
ロボットの任意の点が制御入力に対してどのように動くかを予測する数学的関数。微分幾何学における概念で、局所的な変形を表現する。
Neural Radiance Fields(NeRF)
画像から3Dシーンを再構築する深層学習技術。空間座標を色と密度値にマッピングすることで、多視点画像から3D表現を生成する。
デジタルツイン
物理的な対象物の正確な数学的複製。従来のロボット制御では、実機の動作を予測するために使用される仮想モデル。
クローズドループ制御
出力をセンサーで監視し、その情報を制御入力にフィードバックする制御方式。リアルタイムで状態を調整できる。
空気圧ソフトロボット
空気圧を利用して動作する柔軟な材料で作られたロボット。生物の筋肉のような動きを実現できる。
Allegro ハンド
韓国のWonik Robotics社が開発した多指ロボットハンド。16個のモーターを搭載し、人間の手に近い動作が可能。
【参考リンク】
MIT Computer Science and Artificial Intelligence Laboratory (CSAIL)(外部)
MITの最大の研究所で、世界最重要な情報技術研究センターの一つ。
Neural Jacobian Fields プロジェクトページ(外部)
研究の詳細、技術仕様、実験結果を掲載した公式プロジェクトページ。
GitHub – Neural Jacobian Fields(外部)
NJFシステムのソースコード、データセット、チュートリアルを提供。
Nature論文(外部)
Neural Jacobian Fieldsに関する原著論文。技術的詳細の完全版を掲載。
【参考動画】
【参考記事】
Controlling diverse robots by inferring Jacobian fields with deep networks
(外部)Nature誌に掲載された原著論文。技術的な実装詳細を学術的観点から詳述。
Neural Jacobian Fields プロジェクトページ(外部)
研究者による公式プロジェクトページ。ビデオ、コード、技術解説を含む包括的リソース。
【編集部後記】
今回のMITの研究を通じて、ロボットが「自分の身体を知る」という概念について改めて考えさせられました。私たちが当たり前のように行っている身体の動きも、実は視覚と経験の積み重ねから生まれているのかもしれません。
皆さんは、この技術が普及した未来をどのように想像されますか?スマートフォンでロボットを「教育」できる時代が来たとき、どんな課題を解決したいと思われるでしょうか。また、ロボットが人間のような身体認識を持つことに対して、どのような期待や不安をお感じになりますか?
私たちinnovaTopia編集部も、読者の皆さんと一緒にこの技術革新の意味を考え続けていきたいと思います。ぜひSNSで、皆さんの率直なご意見をお聞かせください。





ノルウェー科学技術大学が開発し、欧州宇宙機関(ESA)が試験協力を行う四脚ロボット「Olympus」が火星探査の新たな可能性を示している。
開発者のヨルゲン・アンカー・オルセンによると、Olympusは従来の車輪型ローバーでは到達困難な障害物を跳躍して克服し、火星の溶岩チューブなどの地下構造も探査できる。火星の重力は地球の約38%であるため、Olympusは地球上よりもはるかに高くジャンプすることが可能だ。このロボットは強化学習という機械学習手法により試行錯誤を通じて自律的に学習し、動的な環境に適応する。ESAのテストプラットフォームでは微小重力条件下での姿勢制御能力が実証されている。
NASAやESAが人類を火星へ送る計画に取り組む中、Olympusのようなロボットは宇宙飛行士の探査、偵察、支援任務において重要な役割を果たすと期待される。特に危険すぎて宇宙飛行士やドローンでは探査困難な地域での科学的発見に貢献する可能性がある。
From: ![]() Olympus: The Next-Gen Robot That Will Help Astronauts Conquer Mars
Olympus: The Next-Gen Robot That Will Help Astronauts Conquer Mars
【編集部解説】
実際のところ、このロボットが注目を集める理由は、従来の火星探査の限界を打ち破る可能性にあります。現在運用中のPerseveranceやCuriosityなどの車輪型ローバーは確実性を重視した設計ですが、岩石や急勾配に遭遇すると立ち往生するリスクを抱えています。
強化学習による自律進化の革新性
Olympusの最も革新的な要素は、強化学習による自律適応能力です。事前にプログラムされた動作パターンではなく、試行錯誤を通じて自らの動作を最適化していく能力は、未知の環境での探査において極めて重要な意味を持ちます。
これまでの火星ローバーは地球からの指令を受けて動作しますが、通信遅延が最大24分に及ぶため、リアルタイムの障害回避は困難でした。しかしOlympusのような自律学習システムなら、現地で即座に判断し、新しい環境に適応できます。
地下探査への扉を開く技術的意義
特に注目すべきは、火星の溶岩チューブ探査への応用可能性です。これらの地下構造は放射線シールドとしての機能だけでなく、水氷の存在や過去の生命活動の痕跡を保護している可能性が指摘されています。
現在のドローン技術では地下空間の探査は困難ですが、Olympusの跳躍能力により、これまでアクセス不可能だった領域への道筋が見えてきました。火星の重力が地球の38%という環境特性を逆に活用し、地球上よりもはるかに高くジャンプすることが可能になります。
潜在的なリスク要因
一方で、いくつかの技術的課題も存在します。機械的な複雑さが増すことで故障リスクが高まる可能性や、火星の極寒環境下での関節部品の動作性能、さらには着地時の衝撃による損傷リスクなどが懸念されます。
また、強化学習システム特有の予測困難な行動パターンも、ミッションクリティカルな環境では慎重な検討が必要です。
長期的な宇宙探査への影響
Olympusのような機動力の高いロボットは、将来の有人火星探査において「先遣隊」としての役割を果たす可能性があります。人間が到着する前に危険地域の調査や資源探索を行い、より安全で効率的な探査活動の基盤を築くことができるでしょう。
さらに重要なのは、この技術が月面基地建設や小惑星探査など、他の天体探査にも応用できる汎用性を持っていることです。低重力環境での機動性という共通課題を解決するプラットフォームとして、宇宙探査全体のパラダイムシフトを促す可能性を秘めています。
【用語解説】
強化学習(Reinforcement Learning)
機械学習の手法の一つで、エージェント(この場合Olympus)が環境との相互作用を通じて試行錯誤により最適な行動を学習する技術である。報酬と罰のフィードバックを通じて自律的に学習し、事前のプログラムなしに新しい状況に適応する能力を持つ。
溶岩チューブ(Lava Tube)
火山活動によって形成される地下洞窟で、溶岩流の表面が固化した後、内部の溶岩が流出することで形成される。火星では地球より重力が小さいため、より大きなサイズの溶岩チューブが存在する可能性が高く、将来の人類の居住地や科学調査の対象として注目されている。
微小重力(Microgravity)
地球の重力よりもはるかに小さな重力環境を指す。火星の重力は地球の約38%であり、この環境では物体の動作や移動特性が大幅に変化する。
ORBIT施設
ESAが運営する軌道ロボットインタラクティブテスト施設の略称。宇宙環境を模擬した条件下でロボットの動作テストを行うための専用施設である。
【参考リンク】
European Space Agency(ESA)(外部)
欧州23か国が加盟する国際宇宙機関。本部はパリにあり、宇宙探査、地球観測、衛星通信などの分野で活動している。
NASA(アメリカ航空宇宙局)(外部)
アメリカの宇宙開発を統括する政府機関。火星探査ミッションや有人宇宙飛行計画を推進している。
Norwegian University of Science and Technology(外部)
ノルウェー科学技術大学。Olympus開発者のヨルゲン・アンカー・オルセンが所属する研究機関。
【参考動画】
【参考記事】
‘Olympus’ the 4-legged robot could help astronauts explore Mars someday(外部)
Space.comによる詳細なOlympusロボットの技術解説記事とESAテスト内容について報じる。
Four-legged robot’s first encounter with microgravity(外部)
ESA公式サイトによるOlympusの技術詳細とテスト結果に関する公式発表記事。
Lava tubes: the hidden sites for future human habitats on the Moon and Mars(外部)
溶岩チューブの科学的意義と探査価値について説明した専門記事。火星の溶岩チューブの具体的数値記載。
NASA is training human-like robots to explore caves on Mars(外部)
NASA主導のBRAILLEプロジェクトについて報じた記事。火星の洞窟探査ロボット開発の類似事例。
Martian Exploration of Lava Tubes (MELT) with ReachBot(外部)
スタンフォード大学による火星溶岩チューブ探査ロボット「ReachBot」の研究論文と競合技術解説。
【編集部後記】
火星の地表を軽やかに跳躍し、人間では到達困難な溶岩チューブまで探査するOlympus。この四脚ロボットが示す未来は、私たち人類の宇宙進出における新たな可能性を感じさせてくれます。
強化学習により自ら学習し進化するロボットが、宇宙飛行士のパートナーとして活躍する日はもうそう遠くないかもしれません。皆さんは、このような自律進化するロボットと人間が協力して宇宙を探査する未来をどのように想像されますか?
また、地球上での災害救助や危険地域での作業にも応用できそうなこの技術について、どのような分野での活用を期待されるでしょうか?ぜひSNSで皆さんの視点をお聞かせください。

中国のUnitree Roboticsが2025年8月、四足歩行ロボット「A2 Stellar Explorer」を発表した。
同社は以前にヒューマノイドロボット「R1」を発表している。A2は最高速度時速11.2マイル(約18 kph)で走行でき、ホイール装着によりさらに高速化が可能である。積載能力は歩行時最大55ポンド(25 kg)、静止時221ポンド(100 kg)となっている。
超広角Lidar 3D認識技術、前面HDカメラ、高度なコンピューティング機能を搭載し、交換可能な2つのバッテリーを備える。同社は産業用および民間用途向けとしているが、価格と販売時期は未発表である。
米陸軍がAI対応砲塔を装備した類似の四足歩行ロボットをテスト済みであり、中国人民解放軍も独自の四足歩行ロボットを試験している。Unitreeは2016年に設立された企業である。
From: ![]() This remarkable ‘robot dog’ will send a shiver down your spine
This remarkable ‘robot dog’ will send a shiver down your spine
【編集部解説】
Unitree A2 Stellar Explorerが示すのは、ロボティクス分野の急速な技術革新とコスト削減の同時実現です。
技術的ブレークスルーの詳細
従来のBoston Dynamics社のSpotロボットが最高速度1.6m/s(約5.7km/h)に対し、A2は5m/s(18km/h)という約3.2倍の速度を実現しています。これは単なる速度向上ではなく、制御システムの根本的な進歩を意味します。12自由度の関節モーターによる180Nmのトルク出力と、デュアルLiDARシステム(前方・後方配置)による360度環境認識が、この性能を支えています。
実用性における重要な改善点
稼働時間の大幅な改善も注目すべき点です。デュアル9,000mAhバッテリー(計18,000mAh)で無負荷時5時間/20km、25kg積載時3時間/12.5kmの連続歩行が可能であり、ホットスワップ対応により24時間運用が理論上可能です。標準モデルでは8コアCPU、上位モデルのA2-PROではIntel Core i7プロセッサーを搭載することで、リアルタイムでの複雑な計算処理にも対応しています。
産業応用における潜在的インパクト
IP56の外装保護レベルとIP67のコア部品保護により、-20°C〜55°Cの幅広い環境での運用が可能です。これにより、建設現場の測量、災害現場での捜索救助、物流倉庫での自動搬送など、従来は人間やホイール型ロボットに依存していた分野での活用が現実的になります。
軍事応用への懸念と現実
記事で言及された軍事利用については、既に現実のものとなっています。米軍はAI搭載砲塔付きの類似ロボットを中東でテスト済みであり、中国人民解放軍も独自の四足歩行ロボットを試験配備しています。A2の物理的耐久性(最大100kg搭載など)や高速移動能力は、民間用途を超えた応用可能性を示唆しています。
規制環境への影響
現在、四足歩行ロボットに対する包括的な国際規制は存在しません。しかし、A2のような高性能機種の普及により、各国政府は軍民両用技術としての管理強化を検討する可能性があります。特に、自律性能の向上と武装化の容易さが、今後の規制議論の焦点となるでしょう。
長期的な技術トレンドへの示唆
Unitreeが2016年の創業以来追求してきた「高性能ロボットの民主化」というビジョンは、A2により新たな段階に到達しました。同社が過去に発表したGo1(約3,500ドル)やR1ヒューマノイド(推定価格未発表)と合わせ、ロボット技術の大衆化が加速することは間違いありません。
これは単なる製品発表を超えて、人間と機械の共存形態を根本的に変える可能性を秘めた技術的転換点と捉えるべきです。A2が示すのは、SF映画の世界が現実になる瞬間の到来なのです。
【用語解説】
LiDAR(Light Detection and Ranging)
レーザー光を使って物体までの距離を測定し、3次元空間の形状を把握する技術である。自動運転車やロボットの環境認識に広く使用される。
ペイロード(Payload)
ロボットや輸送機器が運搬できる有効荷重を指す。燃料や機体重量を除いた、実際に運べる物質の最大重量である。
クアドルペド(Quadruped)
4脚で歩行する動物や機械を意味し、四足歩行ロボットの技術分野における標準的な呼称である。
自律機能(Autonomous Capabilities)
人間の直接操作なしに、プログラムされた目標に向かって独立して行動できる機能である。センサーデータに基づく判断と行動実行を含む。
IP56/IP67保護等級
国際規格による機器の防塵・防水性能の等級表示。IP56は粉塵の侵入を防ぎ強い噴流に耐え、IP67は完全防塵かつ一時的な水没に耐える。
ホットスワップ(Hot Swap)
機器の電源を切ることなく、稼働中にバッテリーやコンポーネントを交換できる技術である。
【参考リンク】
Unitree Robotics公式サイト(外部)
中国・杭州に本社を置く四足歩行ロボットの世界的メーカー。2016年設立で、消費者向けおよび産業用高性能ロボットの研究開発から販売まで手がける
Boston Dynamics Spot仕様(外部)
比較対象となる米国製四足歩行ロボット。最高速度1.6m/s、積載14kg、平均稼働時間90分(待機時間3時間)の仕様を持つ業界標準機種
【参考動画】
【参考記事】
Watch: Heavy heftin’ robodog smashes speed and agility barriers(外部)
A2の技術仕様詳細レポート。デュアルLiDAR、Wi-Fi 6、4G/GPS対応、octa-coreプロセッサー搭載など技術的詳細を報告
The US Army Is Testing Killer Robot Dogs With AI-Powered Rifles in the Middle East(外部)
Ghost Robotics製「Lone Wolf」ロボット犬が、サウジアラビアのRed Sands実験施設で反ドローン任務にテスト配備されている実態を報告
China tests armed robotic dogs in live-fire drills near Russian border(外部)
中国人民解放軍第76集団軍が、自動小銃を搭載した四足歩行ロボットを実戦演習で使用している映像を公開。ロシア国境近くの北部中国で実施
China Deploys Armed Robotic Dogs in Live-Fire Drills Near Russia’s Border(外部)
CCTV-7の報道に基づく中国軍のロボット犬配備状況の詳細分析。歩兵部隊との連携運用と戦術ドローンとの協調作戦の実例を報告
US Army Looks Into Robot Dog Armed With AI Rifle to Shoot Down Drones(外部)
米陸軍第10山岳師団が「Operation Hard Kill」演習でGhost Robotics Vision 60に搭載されたAI制御ライフルをテスト。自動標的追尾機能の実証実験を詳報
【編集部後記】
A2の圧倒的な性能を目の当たりにして、皆さんはどう感じられたでしょうか。このロボットのプロモーション映像のガラスを突き破るシーンは非常に衝撃的です。
時速18kmで走り、100kgを支える四足ロボットが、もはや研究室の産物ではなく実用段階にある現実。私たちは今、人間と機械の境界線が曖昧になる時代の入り口に立っています。これらのロボットが日常に溶け込んだとき、私たちの働き方や社会のあり方はどう変わるのでしょう。そして、その変化を私たち自身がどう迎え入れていくべきなのか。ぜひSNSで皆さんの率直な想いをお聞かせください。
アイキャッチ提供:弘栄ドリームワークス
蛇口をひねれば当たり前のように出てくる水。ガスコンロに火を点けるたび、あるいは温かい部屋で快適に過ごすとき――私たちは普段、その裏側に張り巡らされた膨大な「見えない道」のことなど考えもしません。
しかし、その現実は想像を絶するスケールで存在しています。
日本中に張り巡らされた配管の総延長は、約124万kmに達します。これがどれほどの距離か想像できるでしょうか?地球の赤道の約30周分。月と地球の距離の3倍以上。この膨大な「道」が、私たちの足の下、建物の壁の中、工場の天井裏に隠れています。
さらに、工場やビルには無数のガス管、空調用配管、工業用配管が存在し、その総延長は想像を絶します。しかも、これらの大部分は人間が通ることを前提として設計されていません。直径数十センチから数メートルまで、狭く暗く、時には有毒ガスが充満する危険な空間です。
この膨大なインフラに、今、深刻な問題が迫っています。
水道管の21%にあたる15.2万km(地球3.8周分)が、すでに法定耐用年数の40年を超えて老朽化しています(厚生労働省、2020年調査)。下水道管も同様で、標準耐用年数50年を超えた管路が4万km存在し、今後急速に増加する見込みなのです。
年間約2万件の水道管事故が全国で発生している現状を見れば、この問題の深刻さが分かります。しかし更新は遅々として進みません。水道管の年間更新率はわずか0.64%。このペースでは日本全国の水道管を更新するのに130年もの歳月がかかる計算です。
古い建物では配管の位置や状態が図面に正確に記録されていないケースが多く、戦後の高度成長期に急ピッチで建設されたビルや工場では、実際の配管ルートと図面が一致しないことは珍しくありません。
この日本の膨大な配管問題に対して、山形県の企業が新しい解決法を提示しました。今回の記事は私たちの生活の「縁の下の力持ち」である配管の抱える問題を日本の企業がロボットとテクノロジーの力で解決を試みているという話です。
今日は配管くんの日!
8月1日が「配管くんの日」とされている理由は、数字の語呂合わせにあります。
「は(8)い(1)かん」の語呂合わせから8月1日に制定されました。この記念日は、株式会社KOEI(旧・弘栄設備工業株式会社)が制定したもので、2024年に日本記念日協会に登録されています。
「配管くん」とは、同社が立命館大学と共同で開発した配管内点検ロボットで、カメラと位置計測センサーを搭載しており、排水管やガス管内の劣化度などを調査できます。
この記念日の目的は配管点検の重要性と建設設備業界の魅力を広く社会に伝えることで、建設設備業界の地位向上と社会的認知の拡大を図り、持続可能な社会の実現に貢献したいという願いが込められています。
配管くんって誰?
配管くんI型は立命館大学と共同開発された、配管探査ロボットです。(Ⅱ型Ⅲ型は大学との共同研究ではありません。)
配管くんにはI~Ⅲまでタイプがありそれぞれに個性的な機能があります。これは「配管点検、洗浄」に特化したロボットだからこそ既存の価値基準にとらわれずに生まれた新しい形とも言えます。
山形発の革新的技術「配管くん」は、単一の製品ではありません。現場の多様なニーズに応えるため、3つの異なるタイプが開発され、それぞれが独自の特長を持って配管業界に革命をもたらしています。
I型:世界初を詰め込んだ新型ロボット
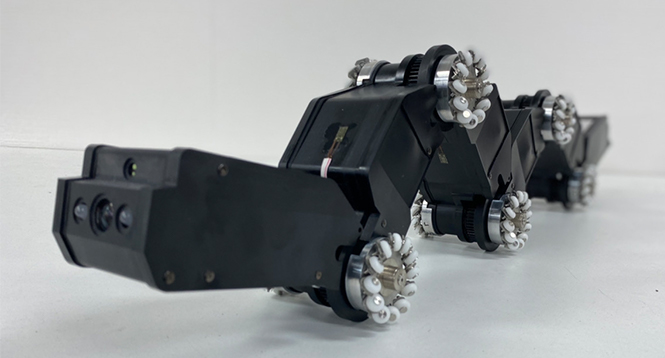
配管くん I型は、まさに配管の中を自由自在に駆け回る小さな探検家です。φ100~φ150mmという中口径の配管に対応し、配管径に合わせて自動的に姿勢が変形するため異径管にも対応可能という柔軟性を持ちます。
直径100~150mmのティーズ管内を自走できるロボットの開発は配管くんが世界初です。
この I型の最大の特徴は、従来困難とされていた縦管調査を可能にしたことです。配管内を尺取り虫のような動きで自走し、車輪を内壁に押し当てることで重力に逆らって垂直方向にも移動できます。5mm程度の段差なら軽々と乗り越え、最長100メートルまでの探査が可能です。
提供:弘栄ドリームワークス
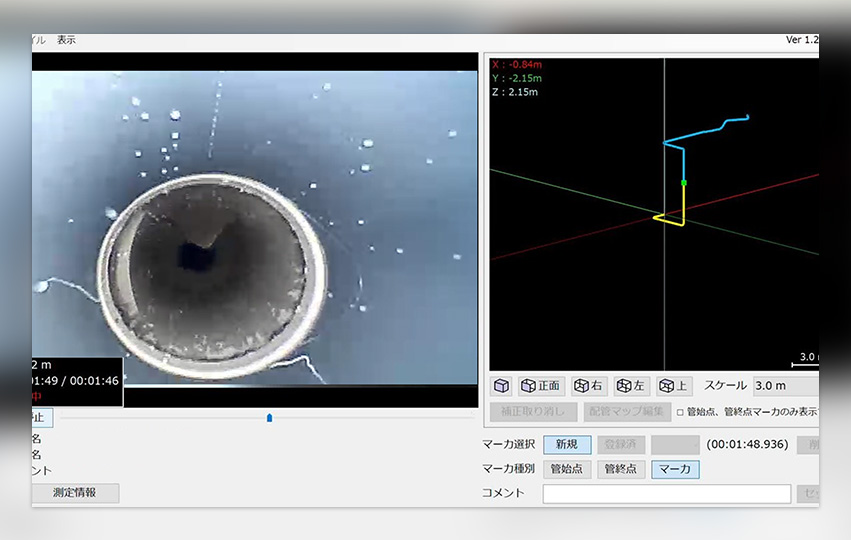
機体にジャイロセンサーが搭載されており、マッピング機能で配管経路を見える化し、進行距離も確認することができるため、従来は図面にも残らなかった複雑な配管ルートを正確に把握できます。特にティーズ管の分岐でもカメラで見ながら正確に進む事ができるのは、熟練技術者でも判断に迷う複雑な分岐点での威力を発揮しています。
II型Aタイプ:一石二鳥の効率マスター
筆者が個人的に一番好きな配管くんです。
配管くん II型Aタイプ:は、「なぜ調査と洗浄を別々にやるのか?」という発想の転換から生まれた革新的なモデルです。センサー内蔵カメラと高圧洗浄ホースを一体化することで、探査と清掃を同時進行できる画期的なシステムを実現しました。

提供:弘栄ドリームワークス
対応口径はΦ40-75/Φ75-125と、より小さな配管にも対応。高圧洗浄の水の噴射を推進力に利用することで、他の動力などが不要なためコンパクトでシンプルなシステムとなっており、40φという細い配管でも問題なく作業できます。
搭載された広角170°カメラとジャイロセンサー、高輝度LEDにより、洗浄作業中でも鮮明な映像撮影が可能です。これまで「調査してから後日洗浄」という二度手間だった作業が、一度で完了する効率性は現場作業員から絶大な支持を得ています。
提供:弘栄ドリームワークス
III型:狭小空間のスペシャリスト
配管くん III型は、最も過酷な環境での調査を想定して設計された特殊部隊のような存在です。25φという極小口径から対応可能で、MTカメラにSSW(バネワイヤー)と呼ばれる特殊なカバーを開発。SSWに回転と押し込みを同時に行う事で、先端が段差を越え曲部を通過し、一般的な押し込み式カメラでは進みにくくなる管も進むことができます。
この III型の真価は、複雑に入り組んだ配管系統での調査能力にあります。約12mのMTカメラで長い配管もカバーし、タブレットで映像を確認しながら作業可能で、電源のない現場でも最大8時間の連続作業ができる独立性を持っています。

提供:弘栄ドリームワークス
回転方向を変えることでティーズ管の分岐も正確に進むことができ、従来のカメラでは到達不可能だった狭小・複雑な配管内部の詳細な調査を実現しています。まさに「行けないところはない」というコンセプトを体現したモデルです。
【取材】
なんと!今回!弘栄ドリームワークスの代表取締役である菅原康弘社長がインタビューを受けてくださいました!今回のインタビューはinnovaTopiaのサイエンスライター:野村貴之が担当します。

野村「配管を探索するロボットは世界初の試みかと思います。はじめようと思われたきっかけはなんだったのでしょうか?」
菅原「そもそも、人が困ったから技術が生まれたんだと思うんですよ。配管ってみんな見えないから気にしてなくて図面が間違ってる場合とかあって、配管ってよくわからなかったんです。あと、うちの会長の船橋が『会社として、仕事として面白いことをしたい』と言ったことが発端ですね。昔ドローンが流行った時期に配管の中をドローンで見れたら面白いかなって思ったらしくて、それがきっかけでしたね」
菅原「今日本中の配管が危機的状況で、高度経済成長期に作られたビルがちょうど50~60年前なんですよ。だから人手も手間も配管を調べまわるのには必要で。そういう困りごとがあるから配管くんは生まれたんだと思います」
野村「配管くんで人の手間ってどのぐらい変わるんですか?」
菅原「場合によりますが、半分から1/3ぐらいになるのかな、と。実際に見積もったらそのぐらいですかね。1日かかっていたことが午前中ですね」
野村「1/3になるのは大きいですね。130年かかるものが40年になったら、かなり現実的ですね」
菅原「もっと言えば、高所に行かないといけないとか、狭いところを通らないといけない作業を人間がしなくてよくなりますね」
菅原「内視鏡検査と考え方は一緒ですね。昔はおなかを切って調べるものが、内視鏡で調べることができてからは対症療法じゃなくて、きちんと予防もできるようになったように、配管くんはビルの人間ドックができるんです」
野村「本当にビルの内視鏡って感じなんですね。事前に簡単にわかれば予防意識も高まりますものね」
野村「立命館大学との共同研究で苦労された点を教えてください。風土や雰囲気が大学と企業は違うなと感じるのですが…」
菅原「僕も昔大学にいたので風土に対する理解があったのはありますね。ただ、技術を作るのは大学で、企業が実用化すると住み分けしたおかげで少しうまくいきましたね。この線引きが産学提携を成功させるカギなのではないでしょうか」
菅原「まずは製品とサービスを出して100点を出さなくても事足りるって考え方が大事ですね。あとは、たまたま提携した大学の教員が『技術は世に出ないと意味がない』って考え方を持っていて、そこもよかったです。幸福な偶然でした」
野村「これはすごく大切ですね。実用化できるところは企業で、大学は新しい技術を作る。ですね」
菅原「そうですね。100点を求めないのは大切ですね。ありがちなのは、みんな『戦艦 大和』を作っちゃうんですよね。製品じゃなくてソリューションを提供するので、技術ではなくお客様が満足できることを優先するのが大切だと思います」
野村「確かに、お客様は論文を提供されても喜ばないですよね」
菅原「サービスレベルを下げて、うまく技術的な実現ができるようにするのが大事ですね」
野村「確かに、完璧なものを最初っから作ろうとすると、大変ですよね」
菅原「スピード感を現場に合わせてマネジメントするのが大切かなと思います。」
野村「何人ぐらいの研究開発グループがいましたか」
菅原「うちの会社の人間は3~4人でしたね。大学や外注先もいましたので全体として20人いましたね」
野村「3~4人……かなり少ないですね。やっぱり少数精鋭のスペシャリストが開発に携わったのですか?」
菅原「少し驚くかもしれませんが、うちの会社は中途で未経験ばかりなので、だからあまり常識にとらわれなかった部分はありましたね。そのおかげで少ないメンバーでも」
野村「どうして、未経験者を積極的に採用されているのですか?」
菅原「会長が新しいことをしようとして、というのがありましたね。設備業界って古い業界なので外から人を入れない雰囲気があったんです。僕も元々ITをしていたので、未経験です。配管くんの話も、もともとソフトウェアを私がいじっていたので、軽いノリでやってみようってなりました。できるとか、できないでやってたら話が進まないので会長の考え方にあったんだと思います。」
菅原「後々になって、いろいろな技術的な問題は出てきて大変でしたが、、、考えていたら進めなかったと思います」
野村「ロボット作ってね。って突然設備会社がなったら少し皆さん驚きますよね。周囲はどのような反応でしたか?」
菅原「最初の3~4年ぐらいはできるわけねえだろみたいな雰囲気は感じていましたね。なるべく無視してましたね。ここは鈍感力が本当に必要でしたね。意識的に鈍感にならないと大変でした」
野村「それはそれは…本当に大変だったんですね」
野村「配管の点検は社会問題だと感じています。僕はこのサービスを見たときに、国中の配管を配管くんが調査したら水道管の問題も解決するんじゃ!って思いました。国と提携する予定はありますか?」
菅原「それね。実は水道管の管理って国だけじゃなくていろんな自治体も絡んでて、水道局側と話しても各地方自治体も困ってて、実態も国が把握しきれていないというのが実情なんです。最終的に国中の水道管を配管くんが直すという構想がありますね。ただ、こういう状況なので、みんな何とかしたいけど動けないんです。本当はそうしたいですね。胃カメラみたいなカプセルを水道管に流して勝手に調べてくれるみたいな」
野村「最後は僕たちが知らず知らずのうちに配管くんがいろんな場所を調べてくれて、みたいなのを想定しているんですか?」
菅原「そうですね。最終的には定期的に一人一台配管くんがいて夜中にごそごそと配管くんが、、、というのを考えていましたね。難しいですが」
野村「なるほどです」
菅原「時にはなんだかんだ言って安全とかも考えると、ヒモとかでつながってた方がいいよねというのもあり今の形なんです。あとはだれが責任をとるのかという観点からも自動化は難しいですね」
野村「個人的に配管くんってかわいいと思うのですが、社長お気に入りの配管くんってありますか?俺はⅡ型が好きです」
菅原「僕もですね。Ⅱ型は生まれがシンプルなんですよ。もともと水を出しながら進む高圧洗浄機の先になんかでカメラをくっつけたのが生まれなんです。正直Ⅰ型は開発費が、億かかってるんですけど、Ⅱ型は10万もかかってなくてとにかく、シンプルなのが一番いいんですよ。下手にいろんな機構があるより、シンプルなのは学問もロボットもいいんですよね」
野村「確かに既存の技術の組み合わせですね。まさにセレンディピティですね。現場の観察眼と柔軟な技術があってこそのプロダクトだと感じました」
野村「この技術がこの先発展していけば、どのように世界が変わると考えていますか?」
菅原「配管くんがみんなから着目されている理由ってアナログだからだと思っているんですよ。ビジコンとかに行くとハードウェアがあるからか、審査員さんに地味だけどハードとソフトが一緒になっているのは強いよねって言われて。これってつまり最後まで残る技術だと思うんですよ」
菅原「例えばGAFAMのクラウドサービスはなくなるかもしれないですが、車はなくならないと思うんですよ。ハードウェアはリアルなものだからなくならないというか」
菅原「100年200年たった時にきれいな水を飲むとか、そういう部分って結局一番大事だと思っているんです。シンプルに人が生きていくうえで一番大切なものが一番世の中を変えていくんじゃないかなという気がします」
菅原社長とのインタビューはさらに続きます!近日公開!
世界の在り方を変えるための時間
地球30周分の水道管が一斉に老朽化を迎え、年間2万件を超える漏水事故が発生している現実を、あなたはどう受け止めるでしょうか?この人類史上類を見ない配管危機に対し、従来の手法では到底追いつきません。130年かかると試算される水道管更新をこのまま放置すれば、私たちの暮らす日本の社会インフラは崩壊の危機に直面します。
しかし、山形の小さな設備工事会社から生まれた「配管くん」を見てください。これは単なる技術革新を超えた歴史的意義を持っています。2011年の着想から7年間という長期にわたる研究開発を経て、立命館大学理工学部との産学連携によって実現されました。
この技術の真の価値は、単に配管を調査することにあるのではありません。インフラ整備の在り方そのものを根本から変える力を秘めています。事後対応から予防保全へ、推測による工事から正確なデータに基づく計画的メンテナンスへ——配管くんは次世代インフラ管理の新たなパラダイムとなりうると感じています。
そして、この成果が私たちに教えてくれる重要な真実があります。真のイノベーションは一朝一夕には生まれないということです。7年間という歳月は、決して長すぎる時間ではありません。基礎研究から応用技術への転換、理論から実用化への道のり——未知の未来を切り開く技術は、必ずこうした時間をかけた地道な積み重ねの上に花開きます。即座の成果を求めがちな現代社会において、配管くんの開発ストーリーは基礎研究の重要性と、長期的視野に立った技術開発の価値を改めて示しています。
立命館大学の研究室で培われた基礎技術が山形の現場で実際の課題と出会い、7年の歳月を経て世界初の実用化されました。短期的な利益や即効性ばかりを追求していては、決して生まれ得ない革新があることを配管くんは示しています。
最後に。歴史の転換点というのは、いつも後世に生きる私たちの目線で語られます。例えば、今やコロナウィルスの検査の際に欠かせなかったPCR法は1983年にアメリカのベンチャー企業が生み出したものです。しかし、私たちの生活に差し迫るパンデミックが起こるまで私たちの多くは名前すら聞くことはありませんでした。もっと言えば今や誰しもがレーザー光を見たことがありますが、レーザー技術はアインシュタインが理論を完成させてから、実際にレーザーが作られてそれが技術として確立するまで50年以上の歳月が経っています。おそらく、当時生きていた人の中でレーザー技術やPCR法を「歴史や人の生き方を変えるテクノロジー」と思っていた方は少なかったと思います。
歴史はいつも結果論です。少し先の未来、「配管くんの日」が人類の歴史の中で重要な日として認識される時が来るのかもしれません。
【information】
弘栄ドリームワークス公式HP( https://koeidreamworks.jp/ )
配管くんサービス紹介(https://koeidreamworks.jp/service/robot/)